Category: Combat Robotics
-

C’est Une Éponge
This was my first attempt at carving out the sponge to contain the functional bits. It’s pretty rough. I learned a few things and have some ideas how to do better next time… and I still have more sponges, so I’m good.
-
Bots? Is that all I do now?
I started printing bots out of PLA+ which is supposed to be a lot stronger than normal PLA yet prints about the same. So far so good. We can start assembling the final bots now.
-
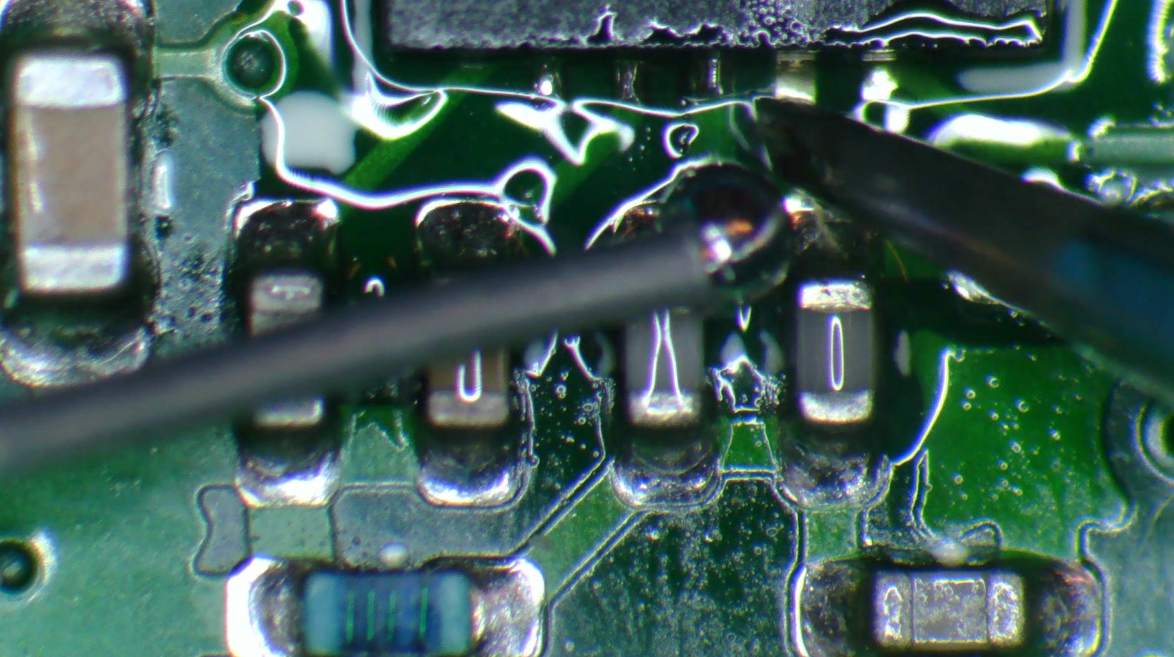
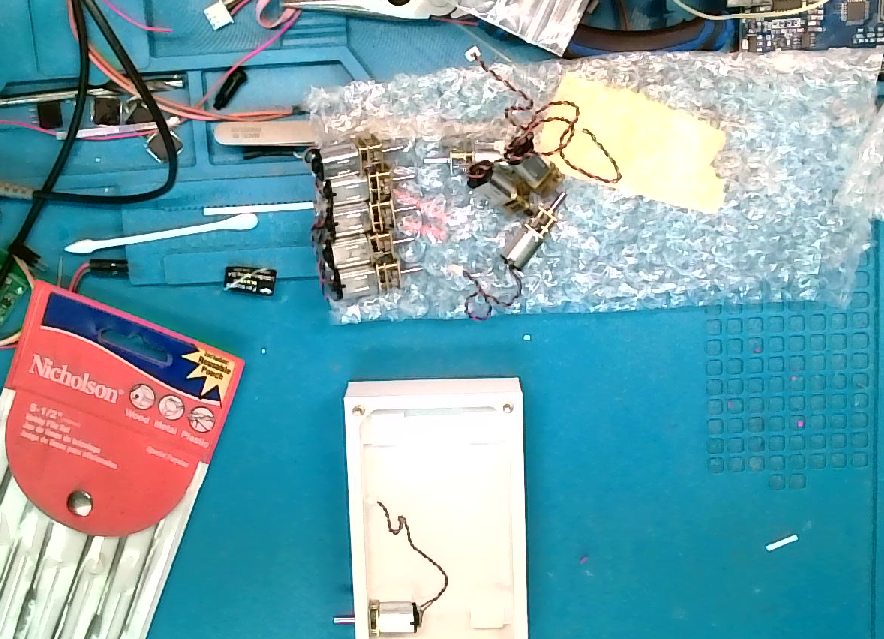
QFN-20 4x4x0.5mm
I can’t say I enjoy soldering these tiny ICs. I bought a fresh 0.5mm soldering iron tip since the last time I tried, and it went much better today. For reference, that solder is 0.5mm diameter. There are 5 pins per side of that chip, which is 4mm square. I usually tack a couple pins…
-
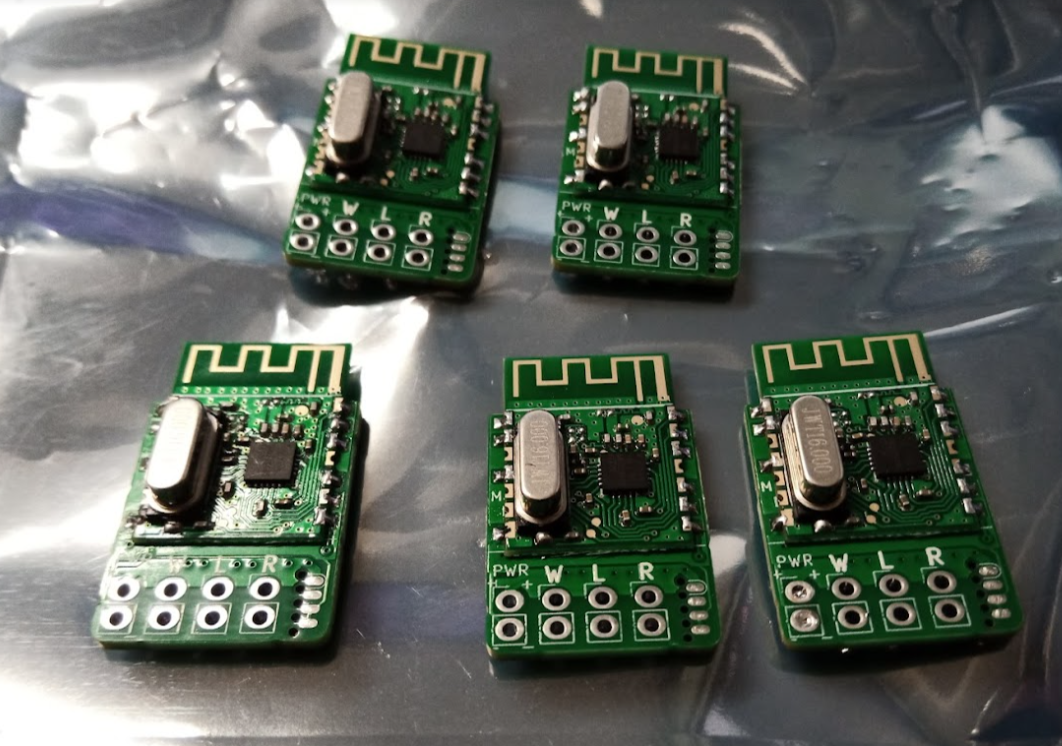
Malenki Plus
I soldered up 7 more Malenki Plus RXESCs today. This will probably be the last of this version that I make. I don’t like the Malenki firmware. I’ve already written my own custom firmware for Flysky 1 transmitters. I might write my own for FS2A as well. I still have more Malenki-HV integrated boards to…
-

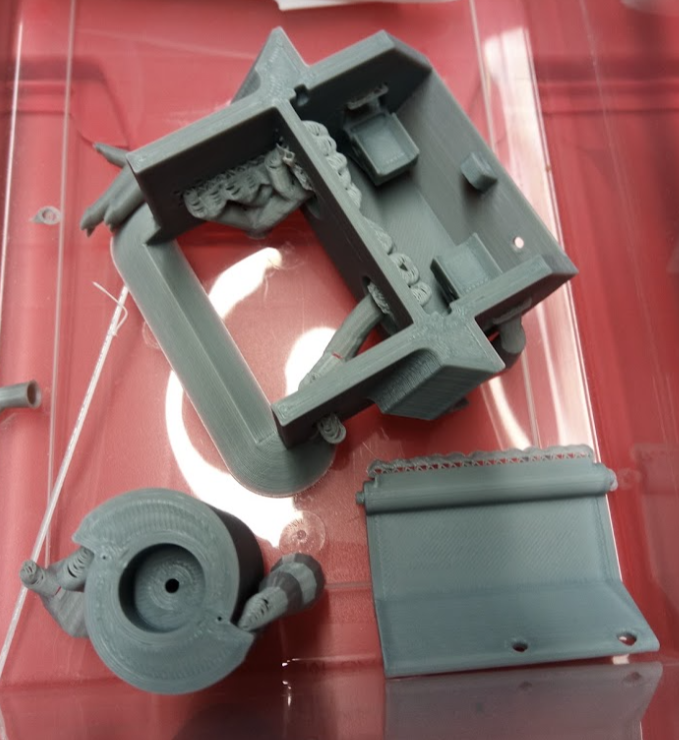
Finished? Really?
Even when I think I’m finished, I’m really not. The lid didn’t fit properly. Well, it was fine except the switch location didn’t fit. (the switch interfered with the motor mount) And, I realized that extruding the “doorstop” at 90 degrees to the plane was wrong. That back point is NOT 90 degrees. It’s a…
-
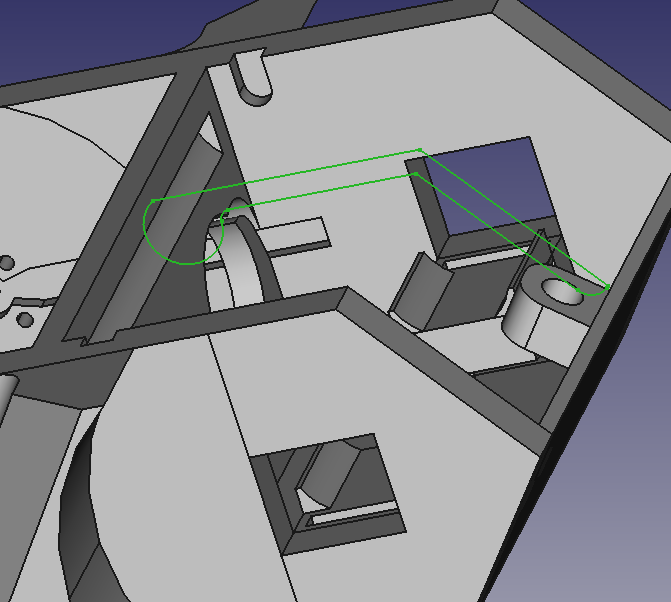
Finishing Up the Design
I still haven’t drawn the lid. That’s the final piece. Hopefully, after this, everything just fits and I can print a couple out of PLA+.
-
N20 Motors
The N20 motors for Serendipity arrived today! I think I have all the parts I need except for a few minor pieces like washers and screws. (I’m sure I can find something that will work if they don’t show up… but they will.) I need to finish some more Malenki-HV boards so I can start…
-
Drive Test
We took the little (still unnamed) bot to the arena for a better test. (It’s really not safe to spin up a “kinetic energy” weapon outside of a test box.) It turns out the thing actually drives really well on the steel floor. (the magnets are way more effective than I thought they would be.)…
-
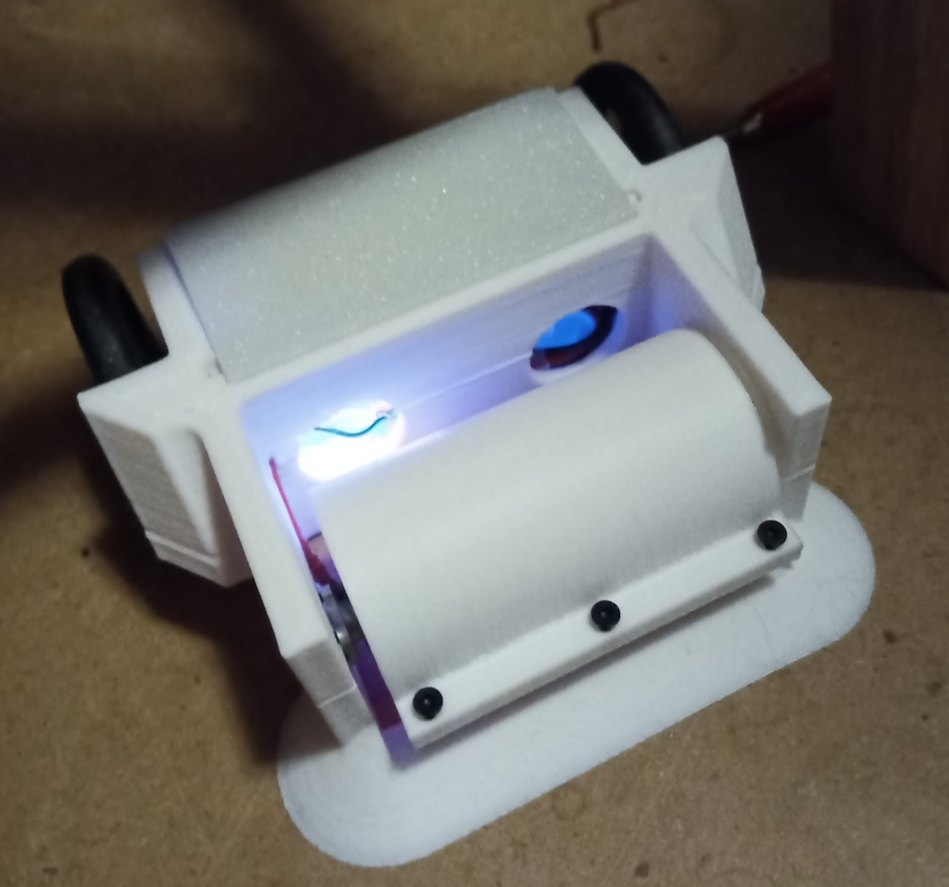
We Test Built the new Fairy
We built a complete version of our new fairyweight. (150g) It works. We drove it around. We twitched the drum. (Will have to put it in a test box and actually spin it up.) This frame has the embedded magnets. We definitely need to set up dual rate on the radio. This thing drives fast.
-

Embedded Magnets!
I added a cavity to accept a 10mm x 2mm magnet. Once the printer started printing the layer which will cover the magnets, I paused it. I placed the magnets in the cavities then pressed continue. This print was a bit over 2 hours. I’m honestly not sure how much these magnets will help. If…