Category: Electronics
-

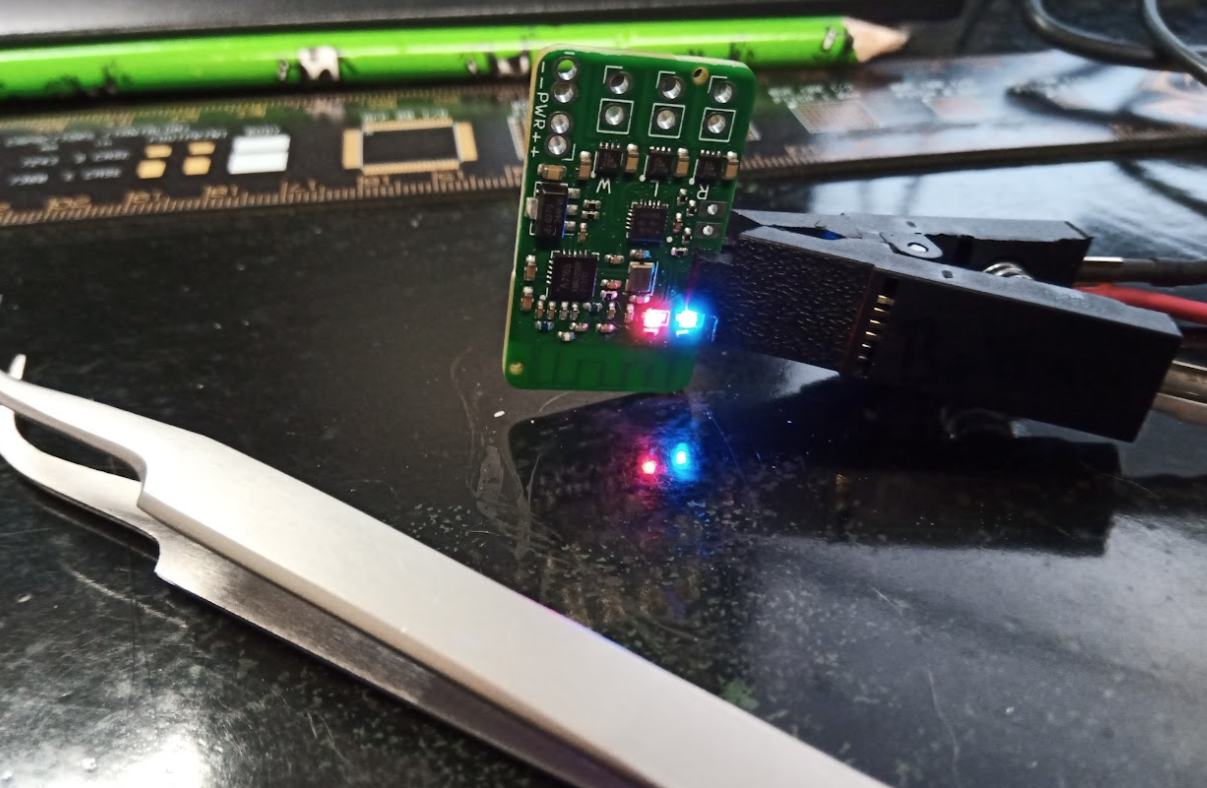
Bringing up a new board
I spent too much time, today, trying to get I2C working on my new board. In the end, it was a software issue not hardware, so I’m generally pleased with that.
-
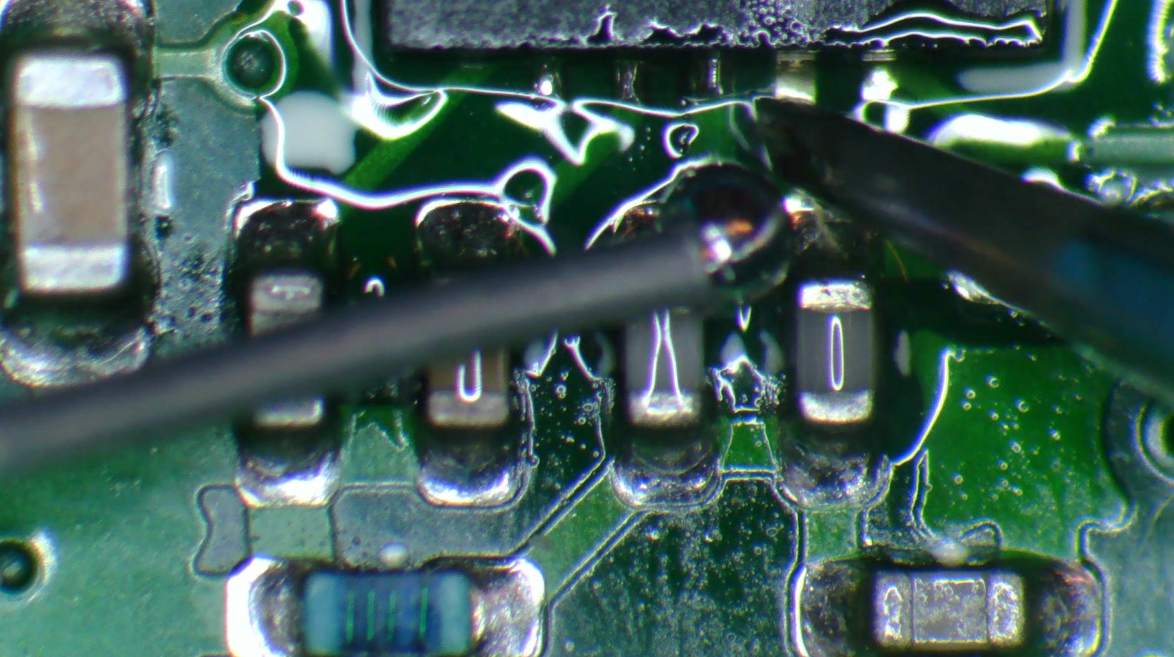
QFN-20 4x4x0.5mm
I can’t say I enjoy soldering these tiny ICs. I bought a fresh 0.5mm soldering iron tip since the last time I tried, and it went much better today. For reference, that solder is 0.5mm diameter. There are 5 pins per side of that chip, which is 4mm square. I usually tack a couple pins…
-
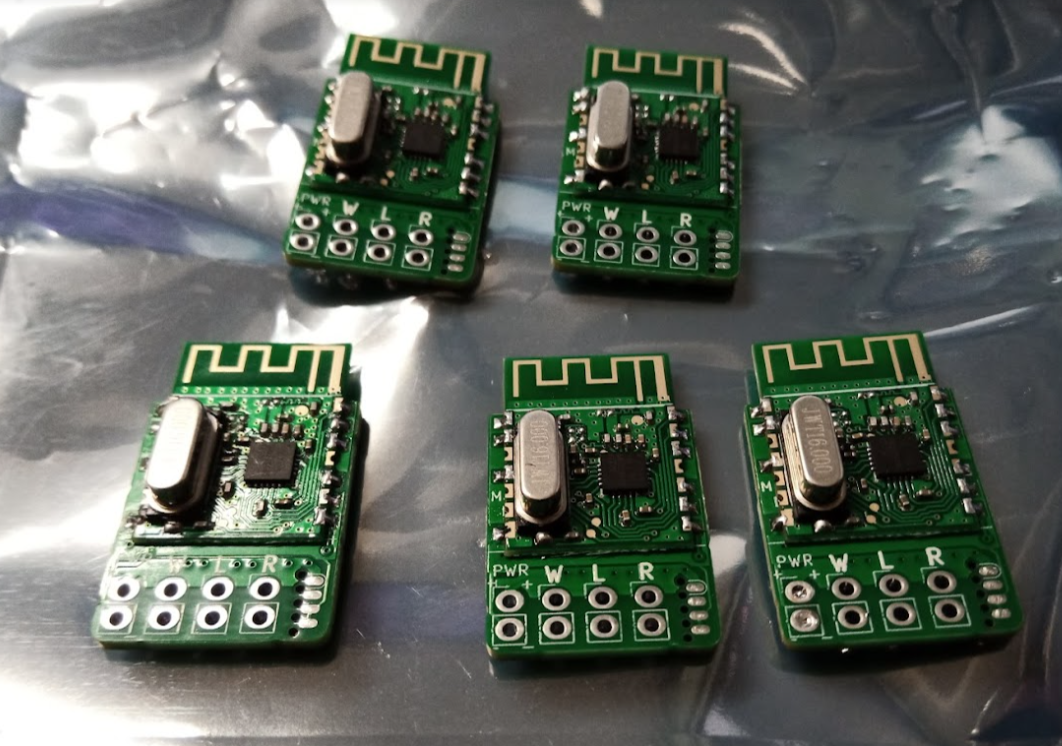
Malenki Plus
I soldered up 7 more Malenki Plus RXESCs today. This will probably be the last of this version that I make. I don’t like the Malenki firmware. I’ve already written my own custom firmware for Flysky 1 transmitters. I might write my own for FS2A as well. I still have more Malenki-HV integrated boards to…
-
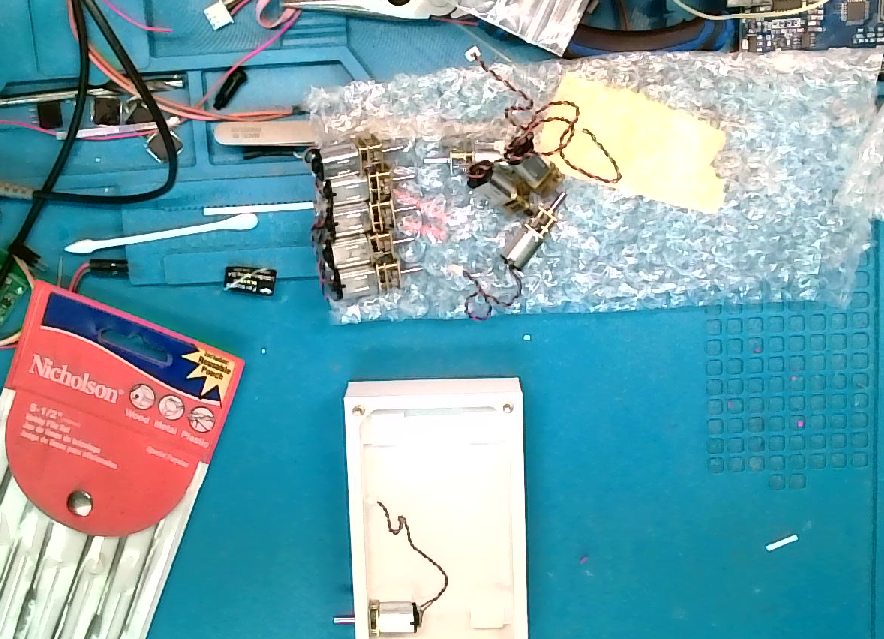
N20 Motors
The N20 motors for Serendipity arrived today! I think I have all the parts I need except for a few minor pieces like washers and screws. (I’m sure I can find something that will work if they don’t show up… but they will.) I need to finish some more Malenki-HV boards so I can start…
-
Drive Test
We took the little (still unnamed) bot to the arena for a better test. (It’s really not safe to spin up a “kinetic energy” weapon outside of a test box.) It turns out the thing actually drives really well on the steel floor. (the magnets are way more effective than I thought they would be.)…
-

It Works!
The first drive on my firmware! It seems to work fine after I figured out which channel was which and which one should run in reverse. (Left and right motors run opposite so the wiring can be the same.) I’ll have to test the servo outputs and the brushed weapon channel as well.
-
Ready to go on a bot
I think this thing is ready to go on a bot for testing! I finished the calibration code today. Now it automatically enters calibration mode right after binding. It may not be perfect, but I think it’s usable. Next up, put it in a bot and drive it around!
-
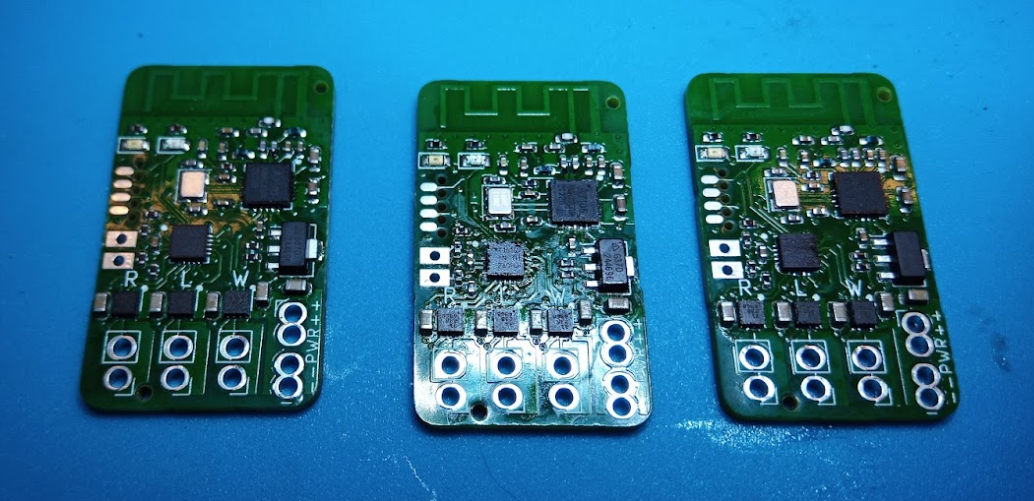
Malenki Integrated
Hand soldering QFNs is a royal PITA. But, two of the first three worked the first try. I’ll try reflowing the one that didn’t work.
-
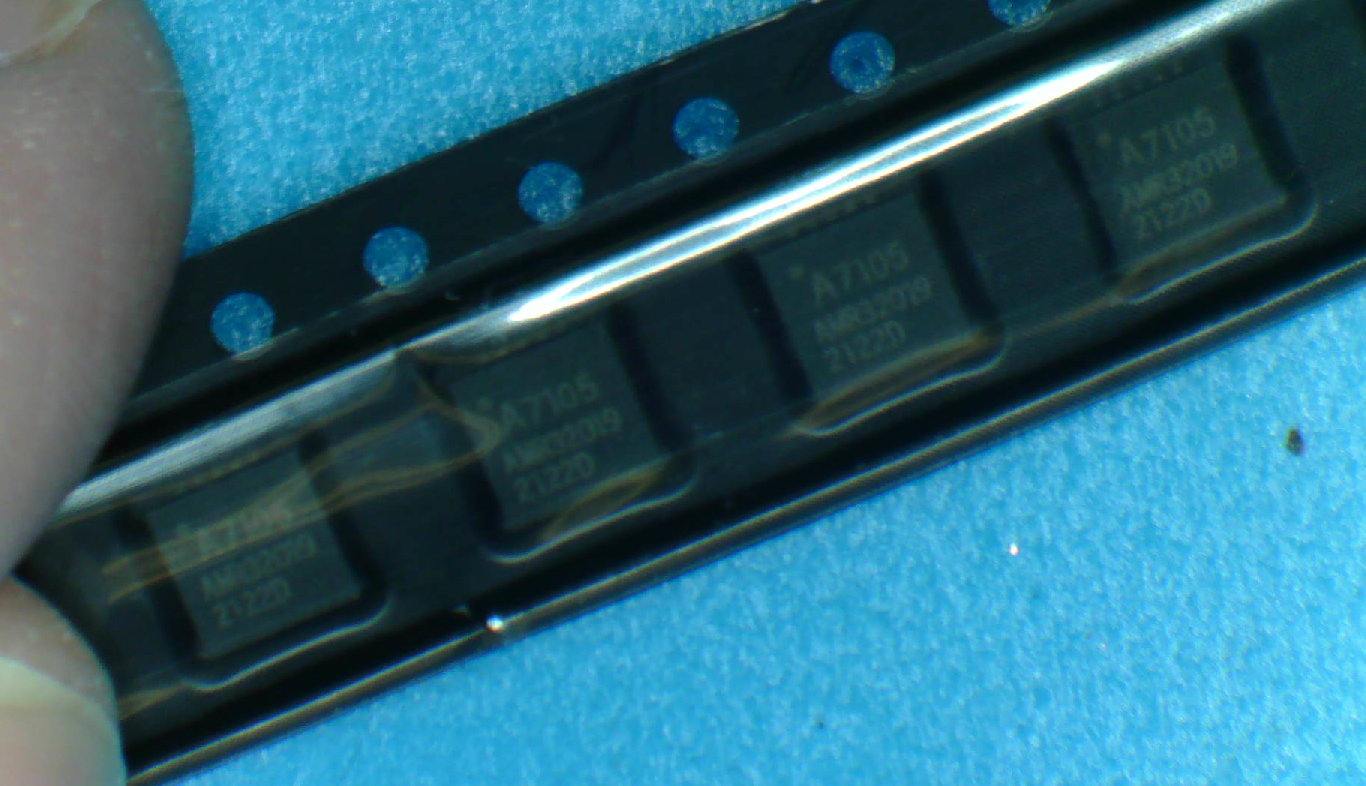
Exciting Mail
In today’s mailbag… after 59 days in transit wrapped in stretch wrap and bubble wrap my A7105 ICs finally arrived! This won’t be the easiest solder job, but it should be possible.
-
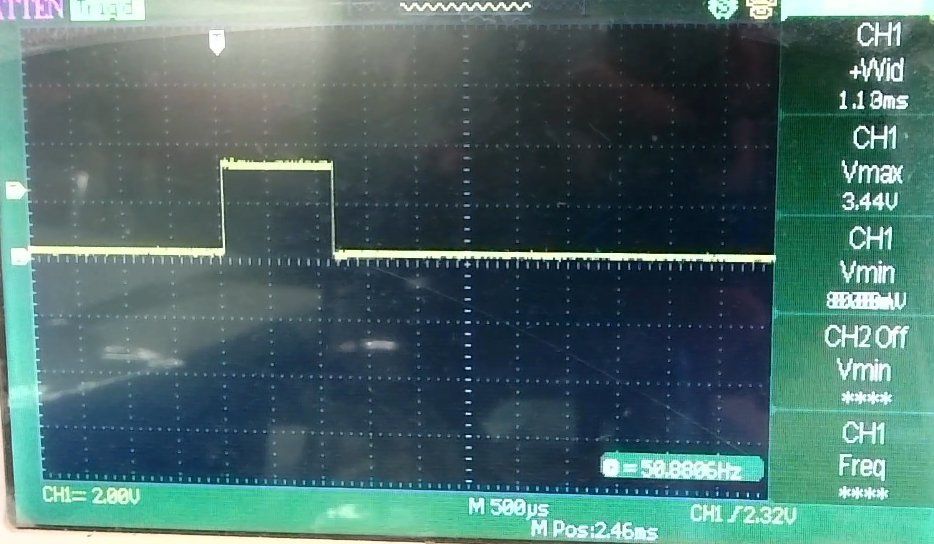
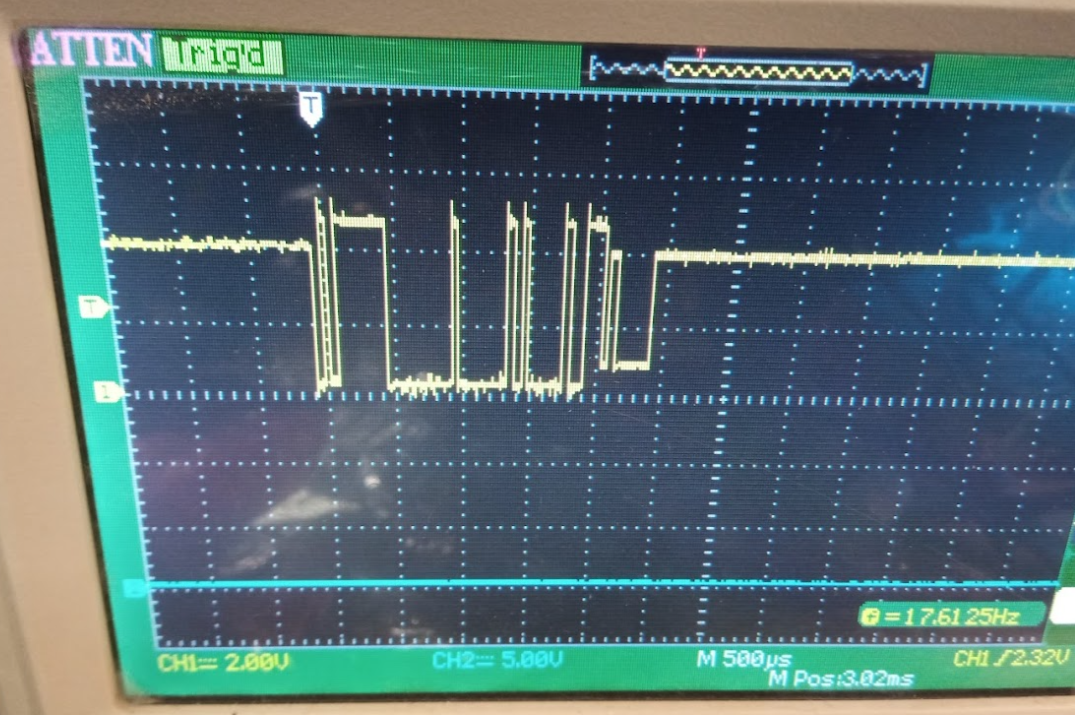
Jittery Servo
This is supposed to be about 1.1ms. But for some reason, it jitters a lot. So, I had to give up on the servo library I was using. It obviously conflicted with something else I was doing… interrupts? timers? who knows? Sometimes that’s a problem with blindly using a library. So, I dug into the…