Category: Combat Robotics
-

It Works!
The first drive on my firmware! It seems to work fine after I figured out which channel was which and which one should run in reverse. (Left and right motors run opposite so the wiring can be the same.) I’ll have to test the servo outputs and the brushed weapon channel as well.
-
Ready to go on a bot
I think this thing is ready to go on a bot for testing! I finished the calibration code today. Now it automatically enters calibration mode right after binding. It may not be perfect, but I think it’s usable. Next up, put it in a bot and drive it around!
-

Going on a diet?
Okay, it may not have been quite as serendipitous as I thought. After adding up all the additional hardware required, I was well over 150g. I managed to lose around 8g today, but I still have about 10g of hardware to add to this pile. It’s going to be tight.
-
Serendipity
When you try to build an antweight but you accidentally build a fairyweight that’s Serendipity.
-
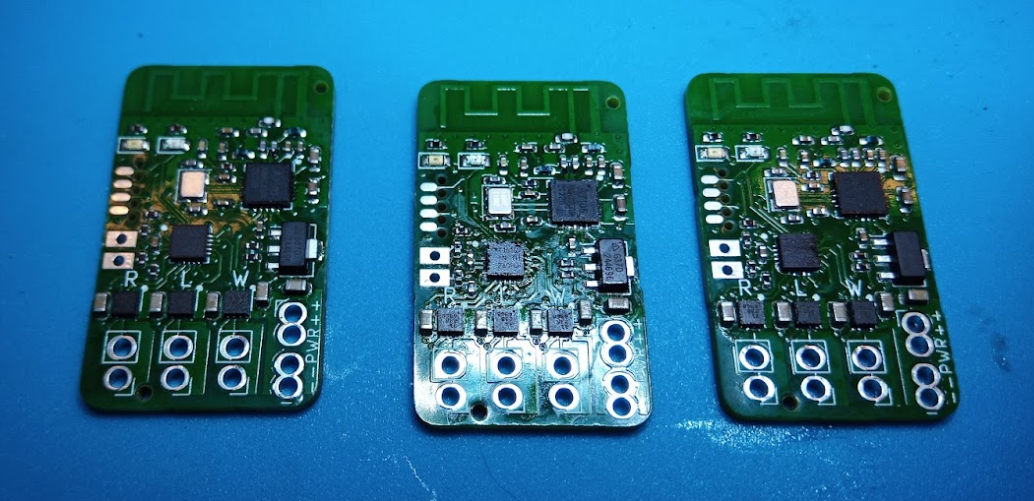
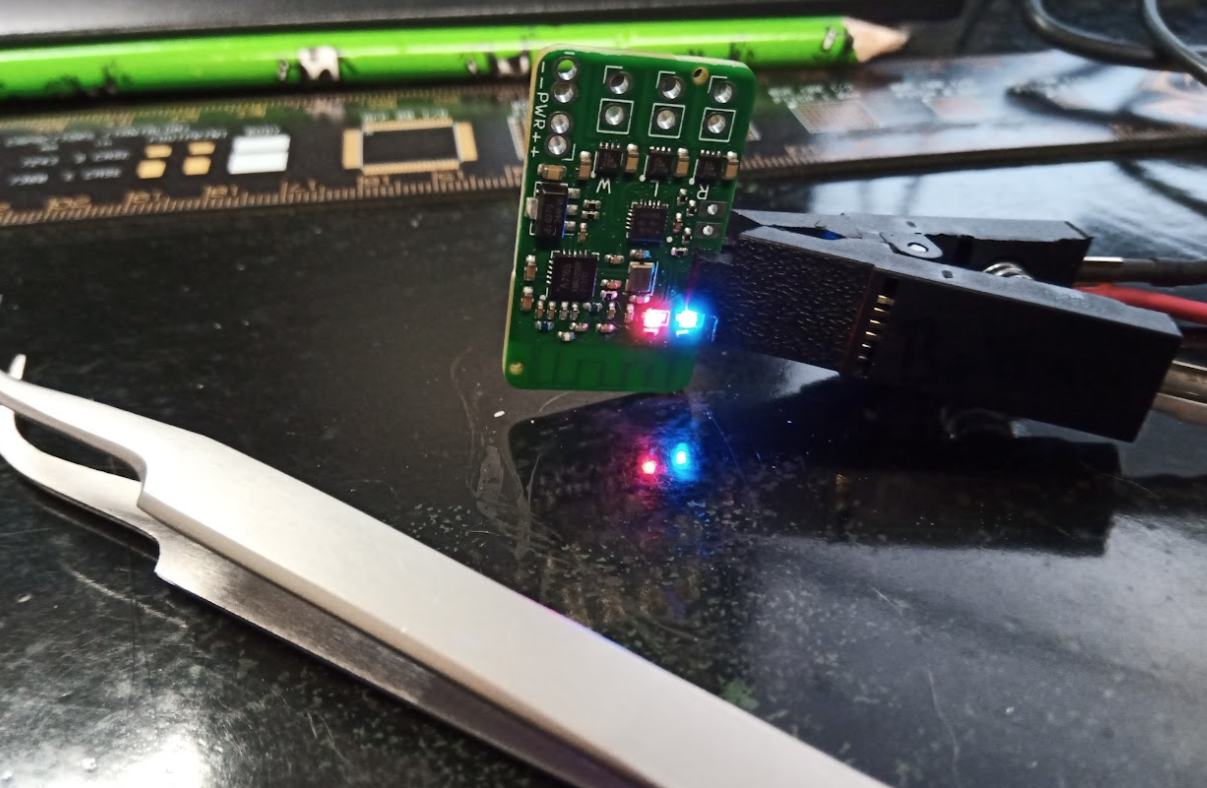
Malenki Integrated
Hand soldering QFNs is a royal PITA. But, two of the first three worked the first try. I’ll try reflowing the one that didn’t work.
-
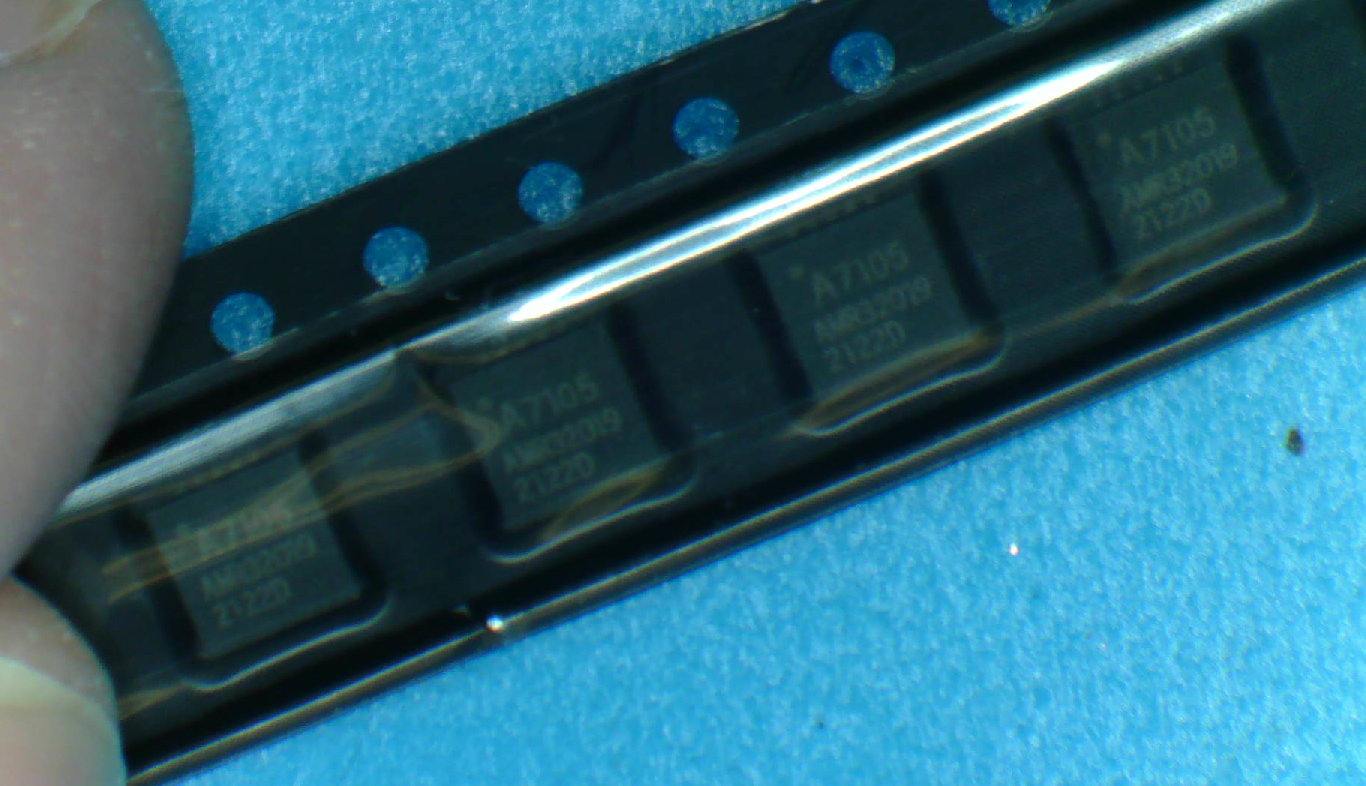
Exciting Mail
In today’s mailbag… after 59 days in transit wrapped in stretch wrap and bubble wrap my A7105 ICs finally arrived! This won’t be the easiest solder job, but it should be possible.
-
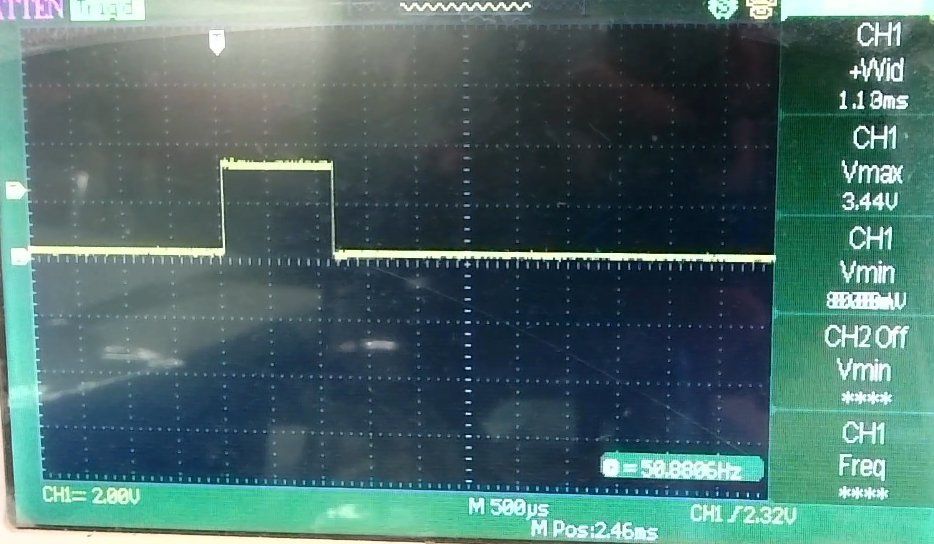
Jittery Servo
This is supposed to be about 1.1ms. But for some reason, it jitters a lot. So, I had to give up on the servo library I was using. It obviously conflicted with something else I was doing… interrupts? timers? who knows? Sometimes that’s a problem with blindly using a library. So, I dug into the…
-
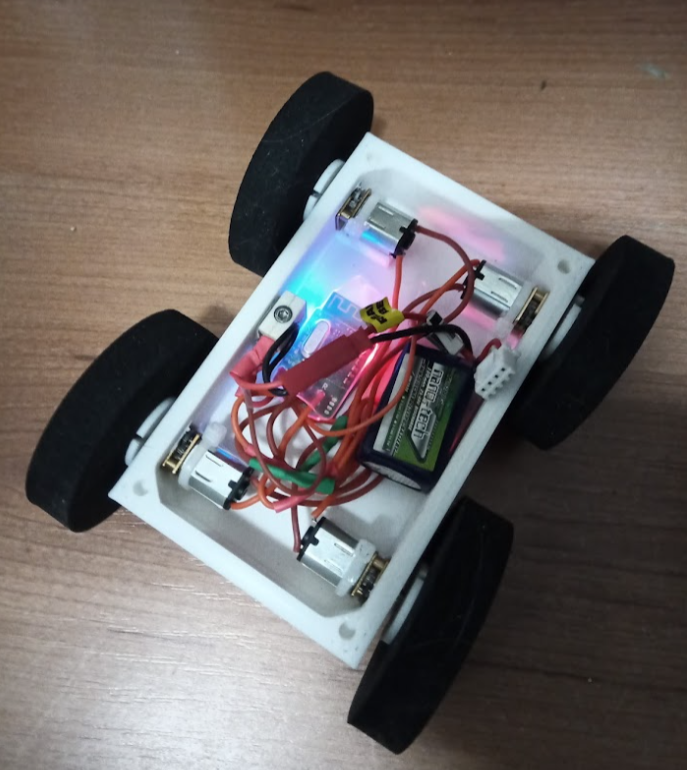
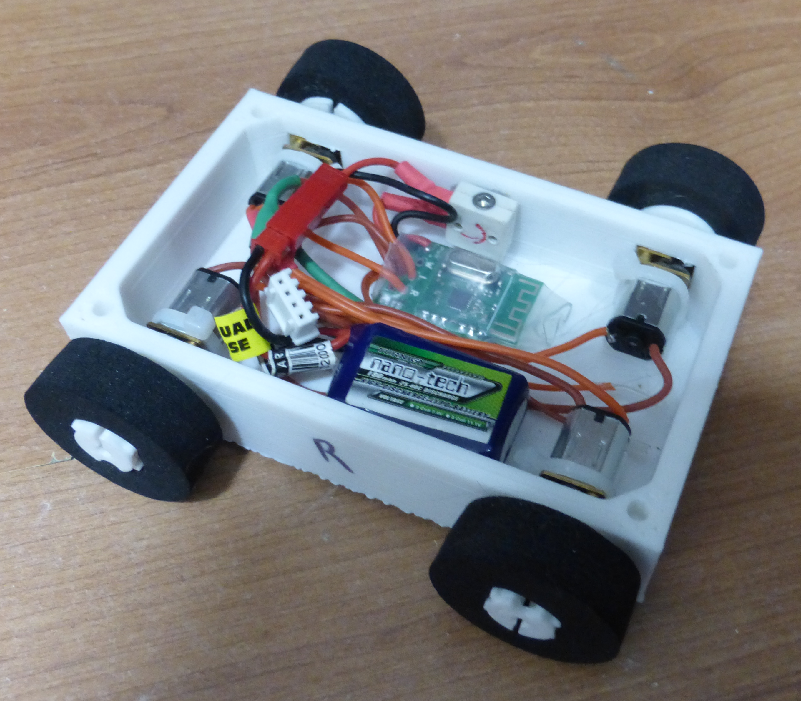
Okay, I didn’t
I didn’t actually do anything with the sponge. Sorry about that. I CADded up the chassis for my silly combat robot. It will be 4WD with 4 N20 motors and 1/2″ x 2.25″ foam wheels. The chassis and the wheel hubs will be 3D printed. So, after printing the chassis and wheel hubs I decided…
-
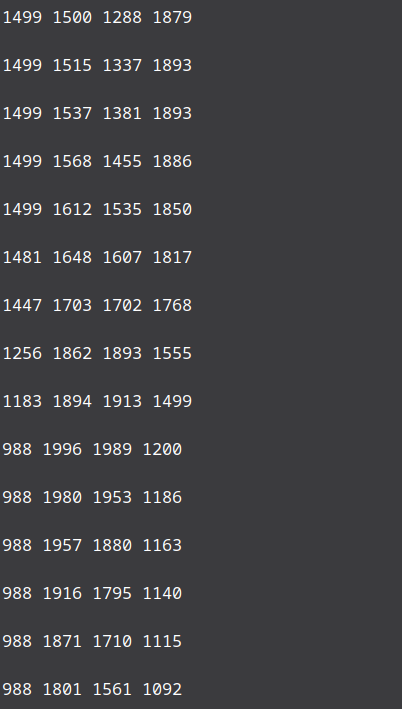
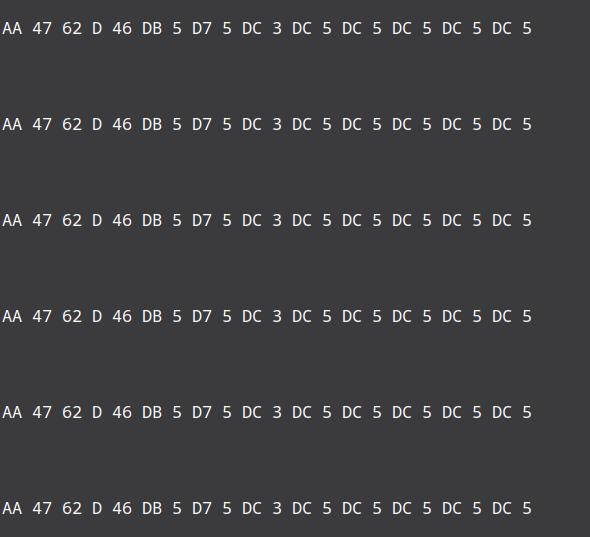
Channel Hopping
Channel hopping is working!!! That’s basically all the hard stuff. Now I just have to make it do simple things like store the bound TX in eeprom, process the sticks data and drive the motor controllers via PWM. (That’s the four sticks data in the image.)
-
Coding
I started writing my own firmware, from scratch, for the Malenki. I want to use them with a HK-T6A V2 transmitter, which uses the AFHDS protocol not the AFHDS 2A protocol the Malenki uses. Despite the similar name, they are entirely not compatible at the firmware level. (But, fortunately, use the same radio hardware.) It…