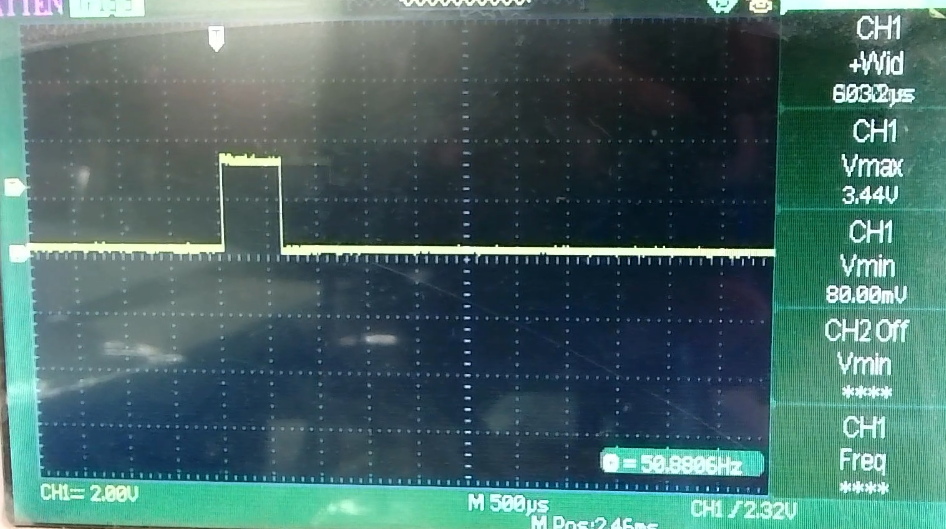
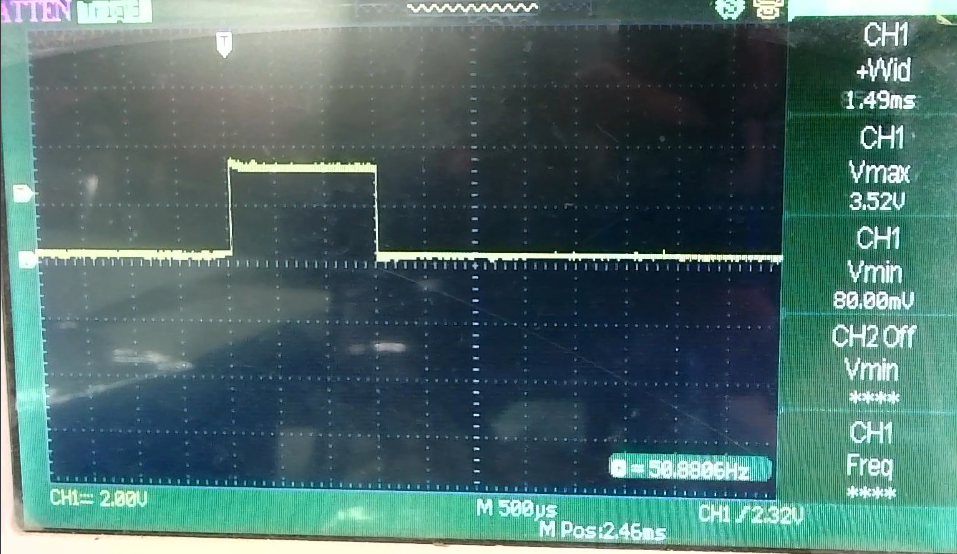
This is supposed to be about 1.1ms.
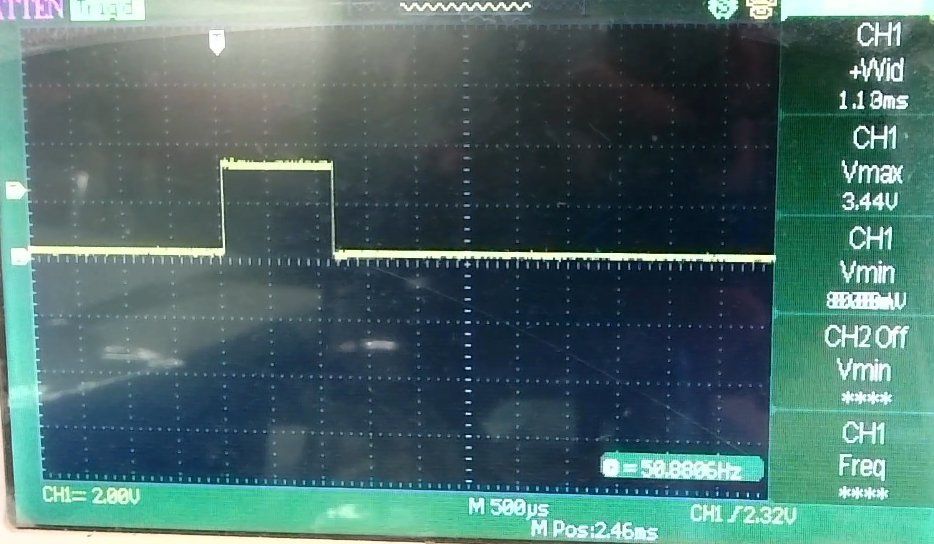
But for some reason, it jitters a lot.
So, I had to give up on the servo library I was using. It obviously conflicted with something else I was doing… interrupts? timers? who knows? Sometimes that’s a problem with blindly using a library.
So, I dug into the datasheet and configured one of the timers to generate the servo pulse for me. A few hours later I had a rock solid pulse! It also saved me 800 bytes of flash.
Leave a Reply
You must be logged in to post a comment.